|
|
Post by sgmason on Sept 4, 2012 19:34:33 GMT -4
Well I finally got around to putting the new Rx in the 600 and binding it to the DX7s. Guess what? The glitch in the pitch channel is gone now  So now its time to start asking some serious questions on set up. - What is the best way to limit swash travel? Using the individual servo limits or using the pitch in the swash menu?
- As a complete noob, yes after 2 failed attempts to get this right I call myself that, what should my pitch settings be at 0°, 25°, 50°, 75°, and 100°? Keep in mind that all I want to do at this time is hover and some mild circuits. No loops or 3D at this time or possibly ever. I really want to put a Huey fuselage on this bird in the long run.
- Last but not least a suggested throttle curve to go with the pitch curve(s). I am not sure of my max head speed yet, but with my gearing and a 6s battery it should be somewhere in the range of 2200 RPM. Would spinning it up with no blades on it give a better idea of what the head speed would be using the data logging of the ICE 100?
Right now all I have done is leveled the swash and nothing more. I did notice I have one problem, or so I think its a problem. If I let the elevator stick go so that it snaps back to center, the servo vibrates, and this in turn causes the swash and blades to vibrate too. I found this out by mistake, the stick slipped out from under my thumb while cycling the servos when I was checking head movement. I will try get a video of what I am talking about for tomorrow. Thanks for the help and input George |
|
|
|
Post by osidak on Sept 4, 2012 19:57:40 GMT -4
Some quick math assuming the following
1100 KV motor running 6S (22.2 volts) would give a maximum motor speed of of 24,420 rpm at 100% efficiency
using the 15t pinion and the stock 170t main gear gives a gear ratio of .0882
.0882 x 24,420 = 2,155 rpm
Assuming the use of the governor you have on your Ice 100 limits you to 85% and you will see ~ 1,831 rpm
Using the 16t pinion will bump the head speed about 120 rpm but according to the CC calc you blow the hell out of the amp limitations of the ICE 100 and I have noticed it really heats up the battery packs trying to run the 16t pinion and 1953 rpm. My 6S 5A 35C battery saw temps of 165 to 175 degrees on the two runs I did like that.
To get a true 2200 rpm head speed we would need to go up to 12S and run a pretty high KV motor. That said you should be fine with that head speed (I do notice some tail bobble at the lower head speed) until you want to fly some hard core 3D
Read about governors - I think the heli flies much smoother with it as head speeds stay constant
I will differ to the experts on limiting swash travel - As for swash settings my local goto has said I should be flying with a linear curve. That said I currently fly with a little negative pitch at zero to couple clicks up and then ramp up to full pitch at 100% - reason being I want some negative to help me descend in windy conditions but want to avoid plowing into the ground if I go stupid and drop the stick rapidly.
|
|
|
|
Post by Dr. Evil on Sept 4, 2012 20:02:12 GMT -4
Well I finally got around to putting the new Rx in the 600 and binding it to the DX7s. Guess what? The glitch in the pitch channel is gone now So now its time to start asking some serious questions on set up. - What is the best way to limit swash travel? Using the individual servo limits or using the pitch in the swash menu?
- As a complete noob, yes after 2 failed attempts to get this right I call myself that, what should my pitch settings be at 0°, 25°, 50°, 75°, and 100°? Keep in mind that all I want to do at this time is hover and some mild circuits. No loops or 3D at this time or possibly ever. I really want to put a Huey fuselage on this bird in the long run.
- Last but not least a suggested throttle curve to go with the pitch curve(s). I am not sure of my max head speed yet, but with my gearing and a 6s battery it should be somewhere in the range of 2200 RPM. Would spinning it up with no blades on it give a better idea of what the head speed would be using the data logging of the ICE 100?
Right now all I have done is leveled the swash and nothing more. I did notice I have one problem, or so I think its a problem. If I let the elevator stick go so that it snaps back to center, the servo vibrates, and this in turn causes the swash and blades to vibrate too. I found this out by mistake, the stick slipped out from under my thumb while cycling the servos when I was checking head movement. I will try get a video of what I am talking about for tomorrow. Thanks for the help and input George I will try and help as best of my knowledge (which is not much..LOL) as possible but hopefully others can add their 2 cents. Reguarding the question on throttle and pitch curves, I would suggest keeping it all linear. All the cyclic servos can be limited by adjusting the "EPA" (end point adjustment) on your new TX. As far as the head speed is concern, I doubt you're going to get 2200 rpm out of it with a 6s setup but thats ok cause for what you are trying to do, you'll not need a super fast HS anyway. |
|
|
|
Post by osidak on Sept 4, 2012 20:16:39 GMT -4
oh and to question about servo jitter - I have never seen a servo visibly bounce with no input - I have noticed that digital servos make that jitter sound though as they are always recentering but I never actually see them move.
Might be worth it to swap that servo out
|
|
|
|
Post by sgmason on Sept 4, 2012 20:28:13 GMT -4
Some quick math assuming the following 1100 KV motor running 6S (22.2 volts) would give a maximum motor speed of of 24,420 rpm at 100% efficiency using the 15t pinion and the stock 170t main gear gives a gear ratio of .0882 .0882 x 24,420 = 2,155 rpm Assuming the use of the governor you have on your Ice 100 limits you to 85% and you will see ~ 1,831 rpm Using the 16t pinion will bump the head speed about 120 rpm but according to the CC calc you blow the hell out of the amp limitations of the ICE 100 and I have noticed it really heats up the battery packs trying to run the 16t pinion and 1953 rpm. My 6S 5A 35C battery saw temps of 165 to 175 degrees on the two runs I did like that. To get a true 2200 rpm head speed we would need to go up to 12S and run a pretty high KV motor. That said you should be fine with that head speed (I do notice some tail bobble at the lower head speed) until you want to fly some hard core 3D I am running an Align 600MX 1220Kv, because I wasn't the one that won the giveaway  ;D So using your math my max motor speed is 27084rpm with the motor I have. 27084*.0882=2388rpm @ 100% efficiency. I actually have the 16 tooth pinion on it right now, but I will change it out to the 15t after reading about your heat issues. The jitter is more of a high speed vibration, but like I said I will get a video of it tomorrow so everyone can see it. I am not sure if it is actually the servo that is doing it or just a vibration through the blades causing it, but it doesn't stop on its own so I suspect the servo or the Tx/Rx and spring tension. It doesn't happen unless I pull the stick all the way down and let it go, something I don't normally do. I am working on becoming a pinch stick flier, but the thumbs keep finding their way to the top all by themseves  |
|
|
|
Post by sgmason on Sept 4, 2012 20:57:06 GMT -4
Well I finally got around to putting the new Rx in the 600 and binding it to the DX7s. Guess what? The glitch in the pitch channel is gone now So now its time to start asking some serious questions on set up. - What is the best way to limit swash travel? Using the individual servo limits or using the pitch in the swash menu?
- As a complete noob, yes after 2 failed attempts to get this right I call myself that, what should my pitch settings be at 0°, 25°, 50°, 75°, and 100°? Keep in mind that all I want to do at this time is hover and some mild circuits. No loops or 3D at this time or possibly ever. I really want to put a Huey fuselage on this bird in the long run.
- Last but not least a suggested throttle curve to go with the pitch curve(s). I am not sure of my max head speed yet, but with my gearing and a 6s battery it should be somewhere in the range of 2200 RPM. Would spinning it up with no blades on it give a better idea of what the head speed would be using the data logging of the ICE 100?
Right now all I have done is leveled the swash and nothing more. I did notice I have one problem, or so I think its a problem. If I let the elevator stick go so that it snaps back to center, the servo vibrates, and this in turn causes the swash and blades to vibrate too. I found this out by mistake, the stick slipped out from under my thumb while cycling the servos when I was checking head movement. I will try get a video of what I am talking about for tomorrow. Thanks for the help and input George I will try and help as best of my knowledge (which is not much..LOL) as possible but hopefully others can add their 2 cents. Reguarding the question on throttle and pitch curves, I would suggest keeping it all linear. All the cyclic servos can be limited by adjusting the "EPA" (end point adjustment) on your new TX. As far as the head speed is concern, I doubt you're going to get 2200 rpm out of it with a 6s setup but thats ok cause for what you are trying to do, you'll not need a super fast HS anyway. Ok then I guess that it means taking the head off again, limitting the throws then leveling again. Its not like I have a lot to do over the next day or two and the weather is going to keep me grounded anyhow |
|
|
|
Post by osidak on Sept 4, 2012 21:04:13 GMT -4
I know on my erazor I used the swash mixing menu on my A9 to limit max pitch after I changed all the servos. seemed to work ok -
So with that motor and the 15t pinion you would see 2031 rpm using the gov setting - Run the castle calc to see what kind of amps you are pulling and see what is safe
|
|
|
|
Post by sgmason on Sept 4, 2012 21:40:23 GMT -4
I know on my erazor I used the swash mixing menu on my A9 to limit max pitch after I changed all the servos. seemed to work ok - So with that motor and the 15t pinion you would see 2031 rpm using the gov setting - Run the castle calc to see what kind of amps you are pulling and see what is safe I am using the Spektrum DX7s and the only thing I can find that could be similar to a what you are talking about is the is in the swash menu, it gives the Aileron, Elevator and Pitch with a percentage number beside each. Factory settings are all at 60% Looks like the calculator doesn't have any Align motors in it, must be because of something like what Align tried doing over on helifreak  |
|
|
|
Post by osidak on Sept 4, 2012 21:56:37 GMT -4
If you know the specs of the motor you can key them in under custom - I think castle made some of the align motors to boot.
The pitch setting is what I am thinking - I have played with that setting on the erazor and was able to change the over all pitch range. I would image it would also limit the total negative pitch as well
|
|
|
|
Post by sgmason on Sept 4, 2012 22:04:45 GMT -4
I can't find any of the important specs on the motor to key them in. Things like the no load residence and the number of poles the motor has.
The pitch adjustment adjust both the negative and positive pitch equally so I guess that is what I will use. Now just what should I limit it to? I am guessing to my max positive pitch and use the pitch curve to limit the negative.
|
|
|
|
Post by osidak on Sept 4, 2012 22:45:13 GMT -4
To my eyes that seems to be a good plan
Seems to be a 6 pole motor still looking around for the other specs
|
|
|
|
Post by Valkman on Sept 5, 2012 5:29:59 GMT -4
"What is the best way to limit swash travel? Using the individual servo limits or using the pitch in the swash menu?"
To limit the "Pitch" use the pitch menu. If you are getting way too much pitch, say +15 to -15 limit the throw in the "swash mix" menu. Mine is at 60 for the 3 of them and I get +-12. You do this of course AFTER you level the swash and everything is lined up at ZERO pitch at "50" on the pitch menu. After that you should have a linear pitch curve.
"what should my pitch settings be at 0°, 25°, 50°, 75°, and 100°"
I answered this before no? ;D No matter what your pitch setting are they should be equal distance between each setting in order to get e linear curve. eg 1,2,3,4,5,6 not 1,2.5,3,4,5,7.
For you I would use (ish) -2,3.75 ,5.5,8.25,11.
"suggested throttle curve to go with the pitch curve(s). "
If you are not using Gov mode your one your own not unless you get somone who has the same setup as you. As Doc says I don't think you will get that HS and if you try you may overload the ESC. A 600 heli runs more effecient between 1900 and 2000. This has been well proven. 1900 would be a good place to start. Never run your esc at 75% or below. If you have to do that change your pinion. It's better to be at say 80 - 100.
Best of luck and for payment we want to see a video of the flight. ;D ;D
|
|
|
|
Post by sgmason on Sept 5, 2012 9:47:27 GMT -4
Well it looks like this one is going to sit for the season for sure now because I need a new motor and some 8s batteries to get it to even hover as far as I can tell  This calculator tells me I can get the head speed I need but its just getting there, and says nothing of what it would be doing to my ESC 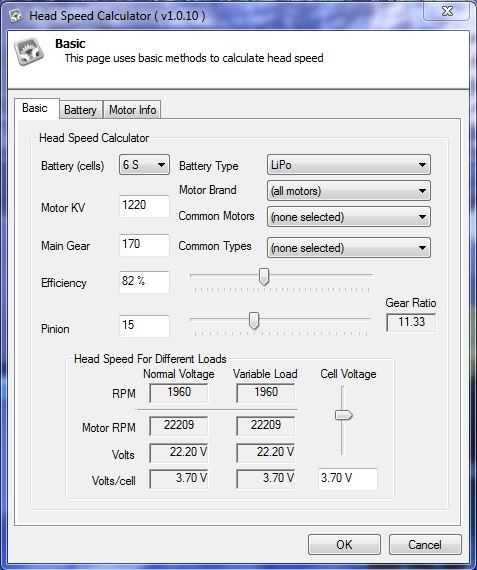 Since I can't find the full specs on my current motor I can't properly enter it into the Castle Calc  so instead of burning out another ESC and or crashing again I am just going to put it on hold till I can do it right. At least I still have the MCP X to play with till then and I should have a couple of upgrade parts for it come in today, less than an hour from now I would guess. |
|
|
|
Post by Valkman on Sept 5, 2012 10:23:47 GMT -4
That says 1960 RPM at 3.7v which is plenty HS. Also you have the voltage set very low at that. Try it at a more average voltage of 3.9 volts and see what your HS is. A fully charged Lipo is about 4.2 volts.
I would not say you will need more battery packs to get it in the air with your setup. You can hover it and see what the data says. i.e ESC temps and amp drain.
|
|
|
|
Post by sgmason on Sept 5, 2012 10:30:37 GMT -4
You saw my last attempt at a hover  that one cost me an ESC, flybar, and tail boom but that was mainly thanks to the glitch in the pitch channel I think. Right now I am waiting to go to the post office to pick up the parts for the MCP X that I ordered last week. None of them were needed, just things I wanted, landing gear with boom support, and a Xrtreme type A unpainted canopy. I want to paint it up to match the Chaos. Should be pretty easy, only 5 colors and a simple 2 color fade. |
|






 ;D So using your math my max motor speed is 27084rpm with the motor I have.
;D So using your math my max motor speed is 27084rpm with the motor I have.



 so instead of burning out another ESC and or crashing again I am just going to put it on hold till I can do it right. At least I still have the MCP X to play with till then and I should have a couple of upgrade parts for it come in today, less than an hour from now I would guess.
so instead of burning out another ESC and or crashing again I am just going to put it on hold till I can do it right. At least I still have the MCP X to play with till then and I should have a couple of upgrade parts for it come in today, less than an hour from now I would guess. that one cost me an ESC, flybar, and tail boom
that one cost me an ESC, flybar, and tail boom 